- HOME
- ABOUT
- PRODUCT
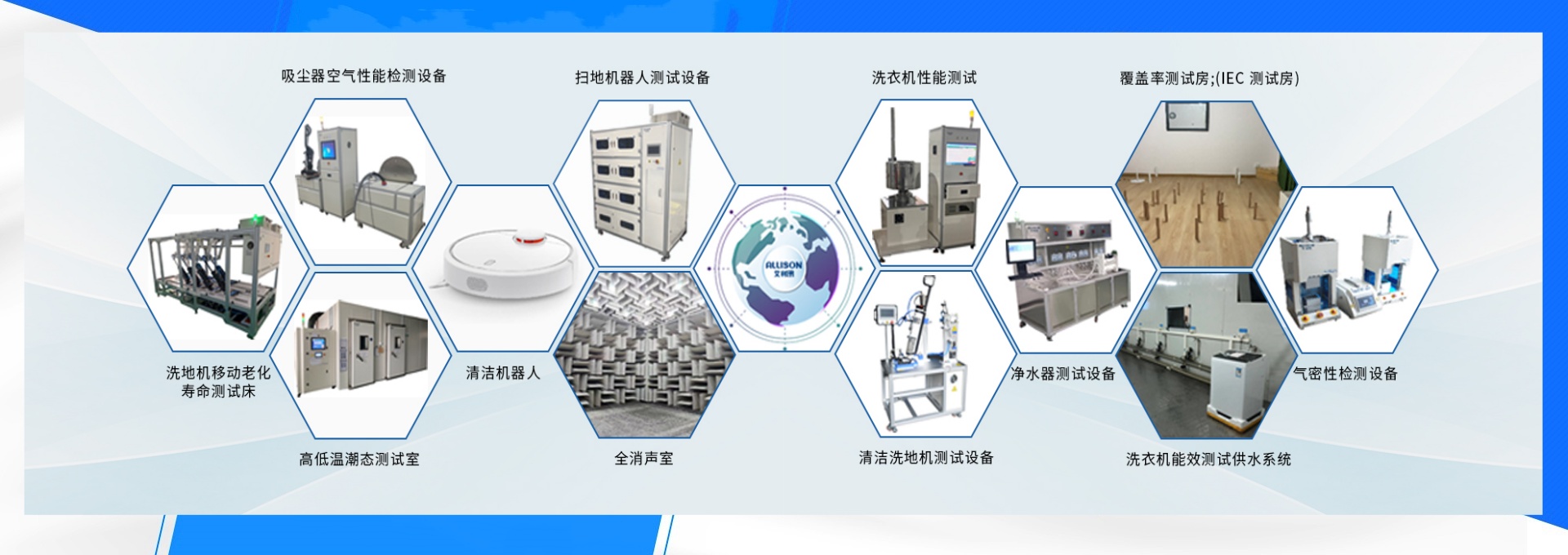
- Cleaning floor scrubber test equipment
- Intelligent toilet testing equipment
- Testing equipment for sweeping robot
- Electric kettle test equipment
- Washing machine test equipment
- Water heater testing equipment series
- Microwave oven; induction cooker test equipment
- Pump testing equipment
- Air tightness, sealing test equipment
- Waterproof testing equipment IPX1 IPX2 IPX3 XIPX4 IPX5 IPX6 IPX7 IPX8
- Iron temperature test equipment
- Water hammer pulse blasting test device
- Temperature Controller series test equipment
- Automotive parts life test equipment
- Vacuum cleaner test equipment
- Constant temperature and pressure water supply system
- Air conditioning; refrigerator test equipment
- Ceiling fan testing equipment
- Spare parts testing test equipment
- Customized test equipment for detection class
- Environmental simulation test equipment
- Hair dryer testing equipment series
- Power cord test equipment
- Water cooler, purifier testing equipment
- Motorcycle, electric vehicle testing
- Air volume wind tunnel test equipment
- Common instruments for safety regulations
- Noise test system; anechoic chamber
- Mask testing equipment
- Switch door life test equipment
- CASES
- NEWS
- TECHNICAL
- CONTACT











 Online
Online Tel
Tel Contact
Contact Home
Home